Note
Go to the end to download the full example code.
Robust design optimization with python solver#
This example demonstrates how to create robust design optimization workflow.
It creates multiple parametric systems using Python node as a solver and then runs the workflow.
Perform required imports#
Perform the required imports.
from typing import Union
from ansys.optislang.core import Optislang
import ansys.optislang.core.node_types as node_types
from ansys.optislang.core.nodes import (
DesignFlow,
IntegrationNode,
Node,
ParametricSystem,
SlotTypeHint,
)
from ansys.optislang.core.project_parametric import (
ComparisonType,
MixedParameter,
ObjectiveCriterion,
OptimizationParameter,
ParameterType,
)
Create workflow creation routines#
Define a routine that adds a python node into parametric system and registers parameters, responses and criteria.
def add_solver_node_to_parent_system(
parent_system: ParametricSystem,
parameter_type: Union[
ParameterType.DETERMINISTIC, ParameterType.MIXED
] = ParameterType.DETERMINISTIC,
) -> IntegrationNode:
"""Create and set up solver node within the parent system.
Parameters
----------
parent_system : ParametricSystem
Parent system to which the solver node will be added.
parameter_type: Union[ParameterType.DETERMINISTIC, ParameterType.MIXED]
Parameter type to be created in parent system.
Returns
-------
IntegrationNode
The created solver node.
"""
solver: IntegrationNode = parent_system.create_node(
type_=node_types.Python2, name="Python", design_flow=DesignFlow.RECEIVE_SEND
)
source_code = r"""from math import sin, sqrt
Y = 0.5 * X1 + X2 + 0.5 * X1 * X2 + 5 * sin(X3) + 0.2 * X4 + 0.1 * X5
Z = ((-1)*sqrt(abs(Y)))**3"""
solver.set_property("Source", source_code)
# Load the available parameters and responses.
props = solver.get_properties()
info = solver._get_info()
for i in range(1, 6):
solver.register_location_as_parameter(location=f"X{i}", name=f"X{i}", reference_value=0.0)
solver.register_location_as_response(location="Y", name="Y", reference_value=3.0)
solver.register_location_as_response(location="Y", name="Z", reference_value=3.0)
# Change parameter bounds.
for i in range(1, 6):
if parameter_type == ParameterType.DETERMINISTIC:
parent_system.parameter_manager.modify_parameter(
OptimizationParameter(name=f"X{i}", reference_value=1.0, range=(-3.14, 3.14))
)
elif parameter_type == ParameterType.MIXED:
parent_system.parameter_manager.modify_parameter(
MixedParameter(name=f"X{i}", reference_value=1.0, range=(-3.14, 3.14))
)
# Create a criterion in the amop system
parent_system.criteria_manager.add_criterion(
ObjectiveCriterion(name="obj_y", expression="Y", criterion=ComparisonType.MIN)
)
parent_system.criteria_manager.add_criterion(
ObjectiveCriterion(name="obj_z", expression="Z", criterion=ComparisonType.MIN)
)
return solver
Create optiSLang instance#
from pathlib import Path
osl = Optislang(loglevel="INFO")
osl.log.info(f"Using optiSLang version {osl.osl_version_string}")
Create workflow#
root_system = osl.application.project.root_system
AMOP system of your choice#
amop_system: ParametricSystem = root_system.create_node(type_=node_types.AMOP, name="AMOP")
# Optionally modify algorithm settings
# num_discretization = 2000
# amop_settings = amop_system.get_property("AlgorithmSettings")
# amop_settings["num_discretization"] = num_discretization
# amop_system.set_property("AlgorithmSettings", amop_settings)
# Fast running solver settings
amop_system.set_property("AutoSaveMode", "no_auto_save")
amop_system.set_property("SolveTwice", True)
amop_system.set_property("UpdateResultFile", "at_end")
# amop_system.set_property("WriteDesignStartSetFlag", False)
# Add the Python node.
amop_python_solver: IntegrationNode = add_solver_node_to_parent_system(amop_system)
Optimization on MOP#
oco_on_mop: ParametricSystem = root_system.create_node(type_=node_types.OCO, name="OCO_MOP")
# oco_on_mop.set_property("PreferCriteriaFromSlot", True)
oco_on_mop.set_property("AutoSaveMode", "no_auto_save")
oco_on_mop.set_property("SolveTwice", True)
oco_on_mop.set_property("UpdateResultFile", "at_end")
# oco_on_mop.set_property("ParameterMergingMode", "merge_from_slot")
oco_mop_solver: IntegrationNode = oco_on_mop.create_node(
type_=node_types.Mopsolver, name="MOP Solver", design_flow=DesignFlow.RECEIVE_SEND
)
# connect
amop_system.get_output_slots("OParameterManager")[0].connect_to(
oco_on_mop.get_input_slots("IParameterManager")[0]
)
amop_system.get_output_slots("OMDBPath")[0].connect_to(
oco_mop_solver.get_input_slots("IMDBPath")[0]
)
ref_val = float(1.0000000000000000001)
for i in range(1, 6):
oco_mop_solver.register_location_as_parameter(
location={
"base": "X1",
"dir": {"enum": ["input", "output"], "value": "input"},
"id": f"X{i}",
"suffix": "",
"value_type": {
"enum": ["value", "cop", "rmse", "error", "abs_error", "density"],
"value": "value",
},
},
# {'is_important': True},
reference_value=ref_val,
)
oco_mop_solver.register_location_as_response(
location={
"base": "Y",
"dir": {"value": "output"},
"id": "Y",
"suffix": "",
"value_type": {"value": "value"},
},
reference_value=0.6987874926243327,
)
oco_mop_solver.register_location_as_response(
location={
"base": "Z",
"dir": {"value": "output"},
"id": "Z",
"suffix": "",
"value_type": {"value": "value"},
},
reference_value=-0.5841409930323823,
)
for i in range(1, 6):
oco_on_mop.parameter_manager.modify_parameter(
OptimizationParameter(name=f"X{i}", reference_value=1.0, range=(-3.14, 3.14))
)
oco_on_mop.criteria_manager.add_criterion(
ObjectiveCriterion(name="obj_y", expression="Y", criterion=ComparisonType.MIN)
)
oco_on_mop.criteria_manager.add_criterion(
ObjectiveCriterion(name="obj_z", expression="Z", criterion=ComparisonType.MIN)
)
Filter designs#
filter_node: IntegrationNode = root_system.create_node(
type_=node_types.DataMining, name="VALIDATOR_FILTER_NODE"
)
# connect
osl.osl_server.create_input_slot(filter_node.uid, "IBestDesigns")
oco_on_mop.get_output_slots("OBestDesigns")[0].connect_to(
filter_node.get_input_slots("IBestDesigns")[0]
)
ofilter = {
"OFilteredBestDesigns": [
{
"First": {"name": "AddDesignsFromSlot"},
"Second": [
{"design_container": []},
{"string": "OBestDesigns"},
{"design_entry": False},
],
}
]
}
dmm = filter_node.get_property("DataMiningManager")
dmm["id_filter_list_map"] = ofilter
filter_node.set_property("DataMiningManager", dmm)
getbestdesigns = {
"First": {"name": "GetBestDesigns"},
"Second": [{"design_container": []}, {"design_entry": 2}], # number of best designs - user set?
}
dmm = filter_node.get_property("DataMiningManager")
dmm["id_filter_list_map"]["OFilteredBestDesigns"].append(getbestdesigns)
filter_node.set_property("DataMiningManager", dmm)
filter_node.load()
filter_node.register_location_as_output_slot(
location="OFilteredBestDesigns", name="OFilteredBestDesigns"
)
Validator system#
validator_system: ParametricSystem = osl.application.project.root_system.create_node(
type_=node_types.Sensitivity, name="Validator System"
)
validator_proxy_solver = add_solver_node_to_parent_system(validator_system)
# Connect
filter_node.get_output_slots("OFilteredBestDesigns")[0].connect_to(
validator_system.get_input_slots("IStartDesigns")[0]
)
oco_on_mop.get_output_slots("OCriteria")[0].connect_to(
validator_system.get_input_slots("ICriteria")[0]
)
Design filter for postprocessing#
append_node: IntegrationNode = osl.application.project.root_system.create_node(
type_=node_types.DataMining, name="Append Designs"
)
if osl.osl_version.major * 10 + osl.osl_version.minor >= 252:
# design filter
append_node.create_input_slot("IDesigns", SlotTypeHint.DESIGN_CONTAINER)
append_node.create_input_slot("IMDBPath", SlotTypeHint.PATH)
ofilter = {
"OValidatedMDBPath": [
{
"First": {"name": "AppendDesignsToFile"},
"Second": [
{"design_container": []},
{"string": "IDesigns"},
{"string": "IMDBPath"},
],
}
]
}
dmm = append_node.get_property("DataMiningManager")
dmm["id_filter_list_map"] = ofilter
append_node.set_property("DataMiningManager", dmm)
append_node.load()
append_node.register_location_as_output_slot(
location="OValidatedMDBPath", name="OValidatedMDBPath"
)
else:
# python script to workaround missing pyoptislang functionalities
command = (
f"append_node = find_actor('Append Designs')\n" "append_node.init_append_best_designs()\n"
)
osl.application.project.run_python_script(command)
validator_system.get_output_slots("ODesigns")[0].connect_to(
append_node.get_input_slots("IDesigns")[0]
)
oco_on_mop.get_output_slots("OMDBPath")[0].connect_to(append_node.get_input_slots("IMDBPath")[0])
Postprocessing node#
postprocessing_node: Node = root_system.create_node(
type_=node_types.Postprocessing, name="PostProcessing"
)
# connect
append_node.get_output_slots("OValidatedMDBPath")[0].connect_to(
postprocessing_node.get_input_slots("IMDBPath")[0]
)
Optimization on python solver#
oco_on_solver: ParametricSystem = root_system.create_node(type_=node_types.OCO, name="OCO_SOLVER")
# oco_on_solver.set_property("PreferCriteriaFromSlot", True)
oco_on_solver.set_property("AutoSaveMode", "no_auto_save")
oco_on_solver.set_property("SolveTwice", True)
oco_on_solver.set_property("UpdateResultFile", "at_end")
# oco_on_solver.set_property("ParameterMergingMode", "merge_from_slot")
oco_proxy_solver = add_solver_node_to_parent_system(oco_on_solver)
# connect
validator_system.get_output_slots("OBestDesigns")[0].connect_to(
oco_on_solver.get_input_slots("IStartDesigns")[0]
)
Robustness system#
robustness: ParametricSystem = root_system.create_node(
type_=node_types.Robustness, name="Robustness"
)
robustness_solver = add_solver_node_to_parent_system(robustness, ParameterType.MIXED)
# connect
oco_on_solver.get_output_slots("OBestDesigns")[0].connect_to(
robustness.get_input_slots("INominalDesigns")[0]
)
#################
# MOP node
# ~~~~~~~~
mop_node = root_system.create_node(type_=node_types.Mop, name="MOP")
# connect
robustness.get_output_slots("OMDBPath")[0].connect_to(mop_node.get_input_slots("IMDBPath")[0])
robustness.get_output_slots("OParameterManager")[0].connect_to(
mop_node.get_input_slots("IParameterManager")[0]
)
osl.log.info("Workflow created")
Optionally save project#
If you want to save the project to some desired location, uncomment and edit these lines:
from pathlib import Path
dir_path = Path(r"<insert-desired-location>")
project_name = "rdo_workflow.opf"
osl.application.save_as(dir_path / project_name)
Run workflow#
Run the workflow created by the preceding scripts. In this example, workflow is run in one step.
osl.log.info("Start execution of the workflow.")
osl.application.project.start()
osl.application.save()
osl.log.info("Project saved.")
Stop and cancel project#
Stop and cancel the project.
osl.dispose()
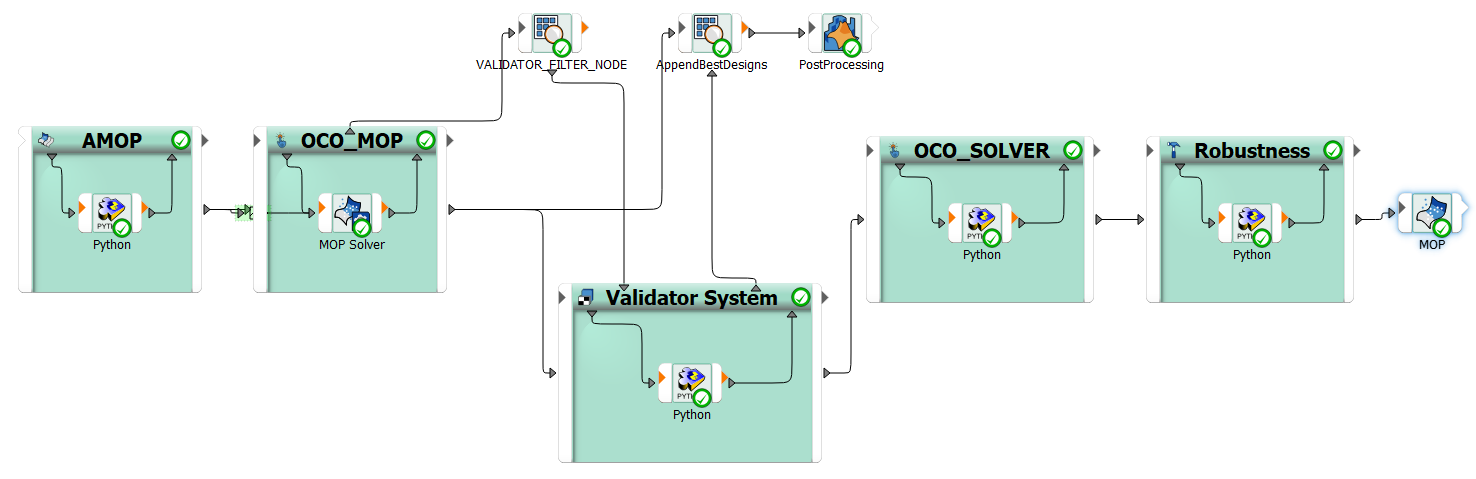
View generated workflow#
This image shows the generated workflow.